
3 แขนกลอุตสาหกรรม
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
แขนกลอุตสาหกรรม
(Industrial Robot Arms) เป็นหุ่นยนต์ชนิดหนึ่งที่นำมาใช้งานในวงการอุตสาหกรรมการผลิต
ได้ถูกนำมาใช้แทนแรงงานมนุษย์ในงานที่ต้องทำอย่างต่อเนื่องตลอด 24 ชั่วโมง, งานที่ต้องทำซ้ำ ๆ กันตลอดเวลา, งานที่เป็นอันตราย, งานที่หนักและยากเกินที่มนุษย์จะทำไหว
ปกติมนุษย์ก็สามารถทำงานได้ทุกอย่าง
แต่ข้อจำกัดของมนุษย์นั้นไม่สามารถทำงานได้อย่างต่อเนื่องยาวนาน เพราะจะเกิดความเหน็ดเหนื่อยเมื่อยล้าจึงต้องมีการพักผ่อน
เมื่อคนทำงานในที่อันตราย เช่นงานที่เกี่ยวกับสารเคมีที่มีพิษ
ถ้าป้องกันไม่ดีก็จะมีผลต่อสุขภาพได้
เมื่อเป็นข้อจำกัดอย่างนี้หุ่นยนต์ก็จะเข้ามามีบทบาทในการทำงานดังกล่าว
และข้อดีของการที่มีหุ่นยนต์ทำงานแทนคนนั้นนอกจากที่กล่าวไว้ข้างต้นแล้ว
ประสิทธิภาพการทำงานก็จะดีขึ้น, มีความแน่นอน แม่นยำ, สามารถทำงานผลิตได้โดยไม่ต้องพัก,
จำนวนชิ้นงานที่ทำก็มากขึ้น, ทำงานได้โดยไม่มีวันหยุด
ส่วนข้อเสียก็มี เช่นมีราคาสูง ต้องมีผู้ชำนาญการในการควบคุมหุ่นยนต์
ไม่เหมาะในโรงงานที่กำลังผลิตน้อย
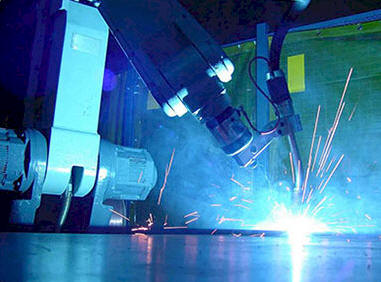
แขนกลอุตสาหกรรมที่เราพบเห็นได้โดยทั่วไปเช่น
ในโรงงานผลิต/ประกอบรถยนต์, งานเชื่อมอุตสาหกรรม,
งานประกอบเครื่องจักร, งานในโรงงานผลิตเหล็ก,
งานเกี่ยวกับคลังสินค้าขนาดใหญ่ และอื่น ๆ อีกมากมาย
แขนกลอุตสาหกรรมนั้นมีส่วนประกอบอยู่หลายส่วนได้แก่ ฐาน (Base) ของหุ่นยนต์, ท่อนชิ้นส่วนที่เป็นแขนกล, ข้อต่อจุดหมุน (Joints) ตามชิ้นส่วนที่ต่อกัน, ปลายของแขนกลที่ใช้ทำงานยกตัวอย่างเช่นมือคีบจับ, หัวเชื่อม, อุปกรณ์ประกอบชิ้นส่วน, ปืนพ่นสี, หัวเจาะ ฯลฯ คอมพิวเตอร์ที่มาควบคุมแขนกลนั้นจะทำหน้าที่ควบคุมในส่วนที่เป็นมอเตอร์แบบสเต็บ หรือสเต็บปิ้งมอเตอร์ (Step motors: เป็นมอเตอร์ที่แตกต่างจากมอเตอร์โดยทั่วไป กล่าวคือมอเตอร์แบบสเต็บนั้นมีความสามารถหมุน และหยุดได้ตามความต้องการ ตามระยะที่ได้ตั้งโปรแกรมไว้ และสามารถทำซ้ำ ๆ กันได้ในการเคลื่อนที่ ส่วนมอเตอร์โดยทั่วไปเมื่อป้อนพลังงานเข้าไปมันก็จะหมุนตลอด และเวลาหยุดจะหมุนฟรีไปหลายรอบซึ่งเป็นผลมาจากแรงเฉื่อย) มอเตอร์แบบสเต็บจึงทำให้หุ่นยนต์ได้เคลื่อนไหวได้ตามโปรแกรมที่ได้ตั้งไว้
นอกจากมอเตอร์แบบสเต็บแล้ว
แขนกลที่มีขนาดใหญ่ที่นำมาใช้ในงานหนักอาจจะใช้มอเตอร์ไฮดรอลิกส์
หรือมอเตอร์ลมนิวแมติกส์ แทนก็ได้ ที่ตัวแขนกลจะมีระบบเซ็นเซอร์ไว้คอยตรวจจับการทำงานเพื่อให้หุ่นยนต์นั้นได้มีการเคลื่อนที่ได้อย่างถูกต้อง
เกิดความแน่นอนในการเคลื่อนที่ของแขนกล
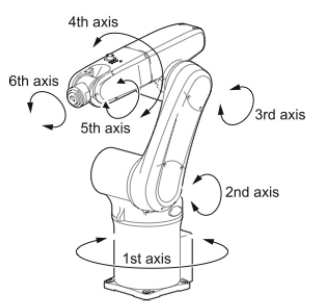
แขนกลอุตสาหกรรมโดยทั่วไปจะมีข้อต่อ
6 ข้อต่อ โดยคล้ายกับแขนของมนุษย์ที่เริ่มนับจากหัวไหล่ ข้อศอก และมือ
ในหุ่นยนต์จะมีฐานหุ่นคล้ายบ่าเพื่อรองรับโครงสร้างที่มีกรเคลื่อนที่
เราเรียกข้อต่อจุดหมุนว่าเป็นองศาอิสระ (Degrees
Of Freedom: DOF)
หมายถึงมันสามารถที่จะเคลื่อนไหวได้อย่างอิสระภายใต้ระยะจุดหมุนที่หมุนได้
ถ้าเปรียบเทียบกับแขนมนุษย์ที่สามารถยกแขนให้เคลื่อนที่จากตำแหน่งไปสู่ตำแหน่งหนึ่ง
แขนกลก็เหมือนกัน โดยแขนกลก็สามารถทำการเคลื่อนที่ได้จากจุดหนึ่งไปสู่จุดหนึ่งภายในระยะขอบเขตรัศมีการเคลื่อนที่
ในการรับน้ำหนักของแขนกลก็จะมีเซ็นเซอร์วัดความดันบอกสถานะน้ำหนักที่รับได้ว่าเกินกำลังของหุ่นหรือไม่
เมื่อน้ำหนักที่ทำงานเกินกำลังของหุ่น จะมีเซ็นเซอร์คอยเตือน และแขนกลก็จะไม่ทำงาน
หุ่นยนต์อุตสาหกรรมจะถูกออกแบบมาให้กับการทำงานที่ซ้ำ
ๆ กันได้อย่างถูกต้อง ในขอบเขตการทำงานที่ถูกควบคุม ตามโปรแกรมที่ได้ตั้งไว้
หุ่นยนต์สามารถทำงานตามหน่วยความจำที่ถูกป้อนไว้ และสามารถทำงานได้อีกครั้ง
อีกครั้ง และอีกครั้งในทุก ๆ เวลา
ในโรงงานอุตสาหกรรมหุ่นยนต์จะทำงานในระบบอัตโนมัติ
ในสายการประกอบรถยนต์ หุ่นยนต์สามารถทำงานได้มากกว่ามนุษย์ และมีความแม่นยำมาก
มันสามารถทำงานในจุดเดิม ๆ โดยไม่ผิดพลาด พวกมันสามารถใส่สลักเกลียว
และสามารถขันได้ตามแรงที่กำหนด หุ่นยนต์ในโรงงานที่ผลิตอุปกรณ์จะพวกไมโครชิป
จะมีความสำคัญมากในการทำงานที่มีอุปกรณ์ขนาดเล็ก มันสามารถทำงานได้อย่างแม่นยำ
ข้อคิดดี ๆ ที่นำมาฝาก
“ถ้ายังหามิตรที่ดีไม่ได้ อยู่คนเดียวยังดีกว่า
อยู่คนเดียวยังปลอดภัยกว่าคบมิตรที่เลว”
อยู่คนเดียวยังปลอดภัยกว่าคบมิตรที่เลว”


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}